E-mail magazine
理経メールマガジン




(2018.6.29 掲載)
ドローンコンテスト編
「空の産業革命」と言われ、ドローンは現在世界中で開発競争が激化しています。「空からの宅配」などが話題にのぼり、今後も目が離せないドローンですが、今回チャレンジしたドローンコンテストとはどのようなものなのでしょうか。
登場人物紹介
-

はとりくん
入社1年目
情報学部卒業で技術部門に所属。
普段は穏やかだが、新しもの好きで秘めた闘志をもつエンジニア。
趣味はゲームと野球観戦。 -

いさか社長
理経の5代目社長、就任三年目。
会社に来るのがワクワクする、みんなで海外旅行に行く会社作りを目指す!
趣味はゴルフ、スーパー銭湯巡り。 -

ふるたさん
防災部門の取締役。クリエイティブな、ある意味オチャメなアイディアを持って新しい商材を探す企画戦略室長も兼任。
趣味はゴルフとスポーツジム。 -

おくいちゃん
日々奮闘している新米広報。
おっとりしたマイペースな性格で人懐っこく、思っていることが顔に出やすい。
趣味は読書とボルダリング。

【ドローンプログラミングコンテストとは?】
ドローンの今後の成長に欠かせないのは、測量、輸送、農業支援など、それぞれの用途にあわせドローンを自動運転させるアプリケーションの開発です。
安全性を確保しながら、精密計測や精密制御を実現するために、ドローン・プログラム開発者の育成は日本の大きな課題の一つにもなっています。
このたび当社も会員になっているソフトウェアベンダー業界団体であるコンピュータソフトウェア協会(CSAJ)が、広く一般・学生を対象にドローン・プログラムの開発者競技の主催・表彰を行うことで、高度なドローン・プログラム開発者を育成し、技能の向上や市場の拡大に貢献することを目的に、国内で初めて開催されることになりました。
2017年●月某日 廊下にて
- ふるたさん
- この間の資料読んでくれたかな。
- はとりくん
- はっ、はい!難しそうですが、チャレンジしてみたいと思います。
- いさか社長
- ドローンは、今注目されてるしな。がんばってや。
- はとりくん
- はい、がんばります!
- おくいちゃん
- コンテストってどんな感じなの?
- はとりくん
- 当日のプログラムは、こんな流れになってるんですよ。
<主なスケジュール・内容>
| 11:00~12:00 | 開会式 プログラミングアイディアのプレゼン審査 |
| 12:00~14:00 | 競技者説明、機体調整 |
| 14:00~14:40 | 競技1 |
| 14:40~15:50 | 競技2 |
| 16:30~17:00 | 表彰式 |
- おくいちゃん
- へぇー、そうなんだね。競技1と競技2って、どんな違いがあるの?
- はとりくん
- ぼくもまだ勉強中なんですが、課題はこんな感じになっています。
コンテストの課題
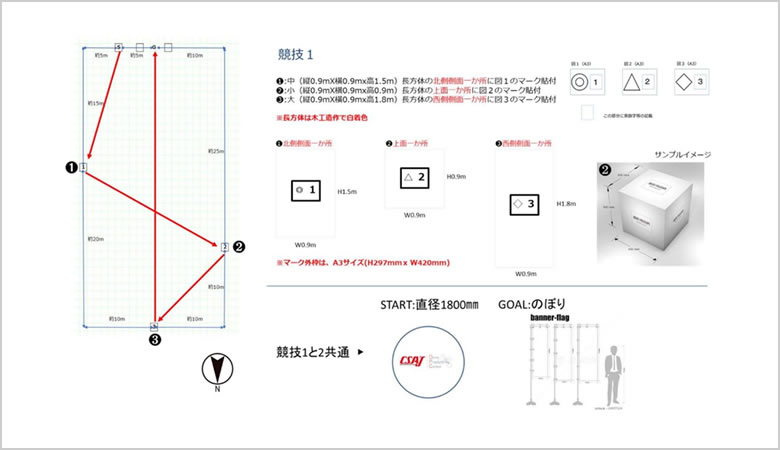
<競技1>
自動航行で、スタートから3か所の指定地点を通り、ゴールまでのコースを正確にスピーディに飛行させる。また指定地点にある対象物を捉えてマーク画像を撮影するというものです。航行時間と貼付画像が正しく認識されたかという点が評価されます。
出典:コンピュータソフトウェア協会 ドローン・プログラミング・コンテスト実施報告書
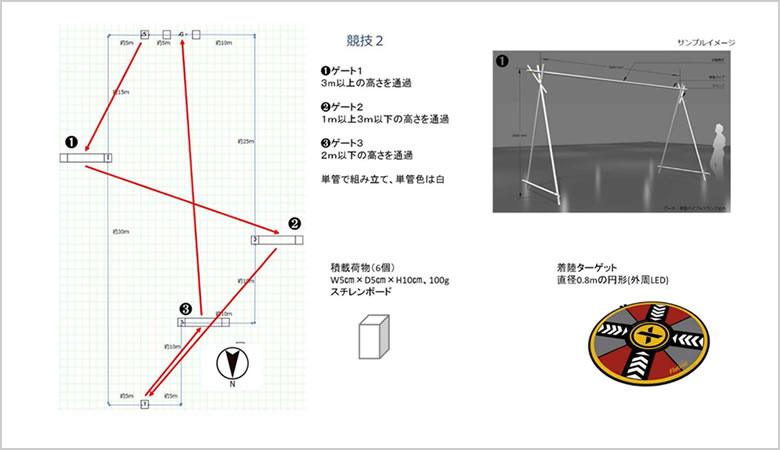
<競技2>
自動航行で一定の高度、コース(障害物の回避)を経由して制限時間内に地上の指定の場所へ積載した荷物(100g)を正確に届け、再度離陸させ自動航行でゴール地点まで到着させるというものです。
出典:コンピュータソフトウェア協会 ドローン・プログラミング・コンテスト実施報告書
- おくいちゃん
- なんだかすごく難しそう・・・。がんばってね!
- はとりくん
- ありがとうございます!がんばって準備するぞ!
3月31日コンテスト当日
- ふるたさん
- いよいよコンテスト当日だね。
- おくいちゃん
- 楽しみですね。
- はとりくん
- なんだか緊張してきた。でも、精一杯やってきます!

コンテストを終えて
- いさか社長
- いやー、おつかれさま。やってみてどうやった?
- はとりくん
- 自動航行は難しかったです。他のチームも使っていましたが、自動航行プログラムは、ドローンメーカーのDJI社の制御プログラムを利用したので、飛行ルート制御と高さに関しては「ある程度」の精度で組むことができました。
現地でも、本番前のテスト飛行の結果からプログラムを修正してみたのですが、数cm単位で位置を調整するのは難しかったです。 - おくいちゃん
- 現地でも修正したりするんだね。
- はとりくん
- そうなんです。競技1は、ある一定の距離からマークを認識させるはずでしたが、対象物の目の前まで移動してしまい、想定していた以上に距離と高さとカメラの角度がズレてしまいました。
なので所定の位置でマークを映像から画像に変えて認識させて撮る方法にしたのですが、その場でホバリングさせて撮るので、位置がほんの少しズレると、カメラに映らなくなって非常に難しかったです。今から考えるとGPSに加えてドローン自身が位置を補正できるようにしておけばよかったです。

- ふるたさん
- なるほど、改善点もあったんだね。
- はとりくん
- 競技2では、カメラに障害物が映った場合は、止まって避けて移動するよう回避設定はしているのですが、今回のように障害物が細いバーだとカメラに映りにくく、また映っても景色の一部と誤って認識してしまうケースがあります。実際にプロペラが当たってしまい、墜落したチームもありました。
- おくいちゃん
- そう簡単にはうまくいかないんだね。
- はとりくん
- 安定して、正確な自動航行を行うには、機体制御や現地の状況などさまざまな状況を想定しないといけないので、マニュアル操作の方が自分で調整できてよほど簡単だなと思いました。

- ふるたさん
- 他に大変だったことはある?
- はとりくん
- コンテスト当日の天気はよかったのですが、風(サクラが散るくらい)が結構あったので苦労しました。もう1ランク上のドローンを購入しておけば、もう少し機体が安定するので、そちらにすれば良かったと思います。
- いさか社長
- やってみるといろいろわかるもんやな、おつかれさま。
- はとりくん
- 今回参加して、GPS と画像、センサー、レーダー、レーザーなどを総合的に駆使して判断するような技術やアイデアが求められると感じました。同じ課題か分かりませんが次回は完璧な航行を実現したいと思います!
- ふるたさん
- 次は第2回だね。ハハハ(笑)